Приведённые ниже текст является частью книги «Первый шаг в квантовую реальность».
Чтобы скачать полный текст, пройдите по ссылке.
5. О неопределённости комплексной матрицы, задающей координаты точки трёхмерного пространства.
Точке трёхмерного пространства x, y, z можно поставить в соответствие, основываясь на KS–преобразовании, комплексную матрицу
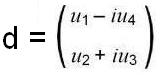 ,
,
и наоборот.
А теперь вспомним, что матрице поворота U0(φ/2) = Ееiφ/2 комплексного пространства, соответствует в трёхмерном пространстве тождественное преобразование при любом угле φ. В этом смысле матрица d и матрица U0(φ/2) ∙ d = еiφ/2 ∙ d фактически тождественны.
Обратите внимание, модуль числа еiφ/2 равен единице.
Это значит, что матрица d, задающая координаты точки трёхмерного пространства, определена с точностью до умножения на произвольное комплексное число с единичным модулем.
6. Задание направлений трёхмерного пространства через половинные углы.
Выше были получены формулы, описывающие повороты в трёхмерном евклидовом пространстве через половинные углы.
Теперь рассмотрим один из способов задания направлений трёхмерного пространства через половинные углы.
Координаты в сферической системе координат естественным образом разделились: θ и φ задают направления, а r — расстояния.
И если речь идёт лишь о направлениях, то полагают для определённости r=1.
Отсюда понятно, что направления можно задавать также и декартовыми координатами x, y, z при условии r=1, или координатами параметрического пространства u1, u2, u3, u4 тоже при условии r=1.
Наконец, направления в трёхмерном пространстве можно также задать с помощью матрицы
,
где u1, u2, u3, u4, как известно, являются функциями половинных углов:
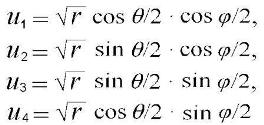 ,
,
причём здесь также следует полагать r = 1.
После подстановки получим матрицу, описывающую направления в трёхмерном пространстве через половинные углы:
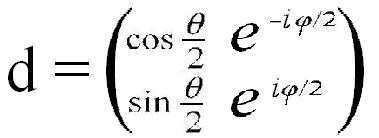 .
.
Матрица d определена с точностью до комплексного множителя с единичным модулем. Поэтому домножив её на еiφ/2, получим наиболее часто встречающиеся выражение для матрицы, задающей направления в трёхмерном пространстве через половинные углы:
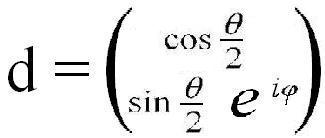 .
.
7. Связь матриц Паули и KS–преобразования.
x = d† σx d =
Аналогично:
y = d† σy d = 2(u1u3 + u2u4),
z = d† σz d = u12 – u22 – u32 + u42,
r = d† σ0 d = u12 + u22 + u32 + u42.
8. Свойства матриц Паули.
8.1. Квадрат любой матрицы Паули равен единичной матрице: σx2 = σy2 = σz2 = σ0 = Е,
8.2. Определитель любой матрицы Паули равен –1.
8.3. Ещё одно важное свойство матриц Паули — их эрмитовость.
Эрмитовыми называются такие матрицы, которые сохраняются после эрмитового сопряжения, т.е. применения в любом порядке двух операций — транспонирования и комплексного сопряжения: М† = (М*)Т = (МТ)* = М.
Здесь знак «†» означает эрмитово сопряжение.
8.4. Правила умножения матриц Паули:
σx ∙ σy = iσz ,
σy ∙ σz = iσx ,
σz ∙ σx = iσy .
кроме того, матрицы Паули антикоммутируют:
σx ∙ σy = – σy ∙ σx ,
σy ∙ σz = – σz ∙ σy ,
σz ∙ σx = – σx ∙ σz .
Отсюда следуют коммутационные соотношения:
σx ∙ σy – σy ∙ σx = 2iσz ,
σy ∙ σz – σz ∙ σy = 2iσx,
σz ∙ σx – σx ∙ σz = 2iσy.
Справедливость этих соотношений легко проверяется непосредственно.
Последние комментарии